Some robots, etc.
Developed and simulated a feedback linearized controller for articulated motor graders. USRA research under Dr. Joshua Marshall at Offroad Robotics.
Designed and evaluated a satellite-imagery-based autonomy pipeline for off-road UGV navigation at DRDC Suffield.
Led system integration and autonomy development for a Level-4 autonomous vehicle as part of the GM–SAE AutoDrive Challenge II.
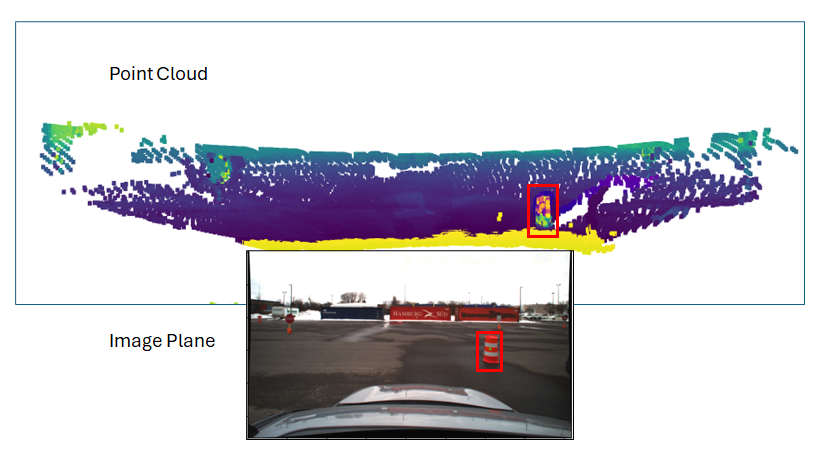
Developed a sensor fusion framework combining camera detections with LiDAR returns for real-time 3D localization on an autonomous vehicle platform.
Designed a ROS2 planning module generating legally traversable routes with lane-level localization and object-aware path evaluation.
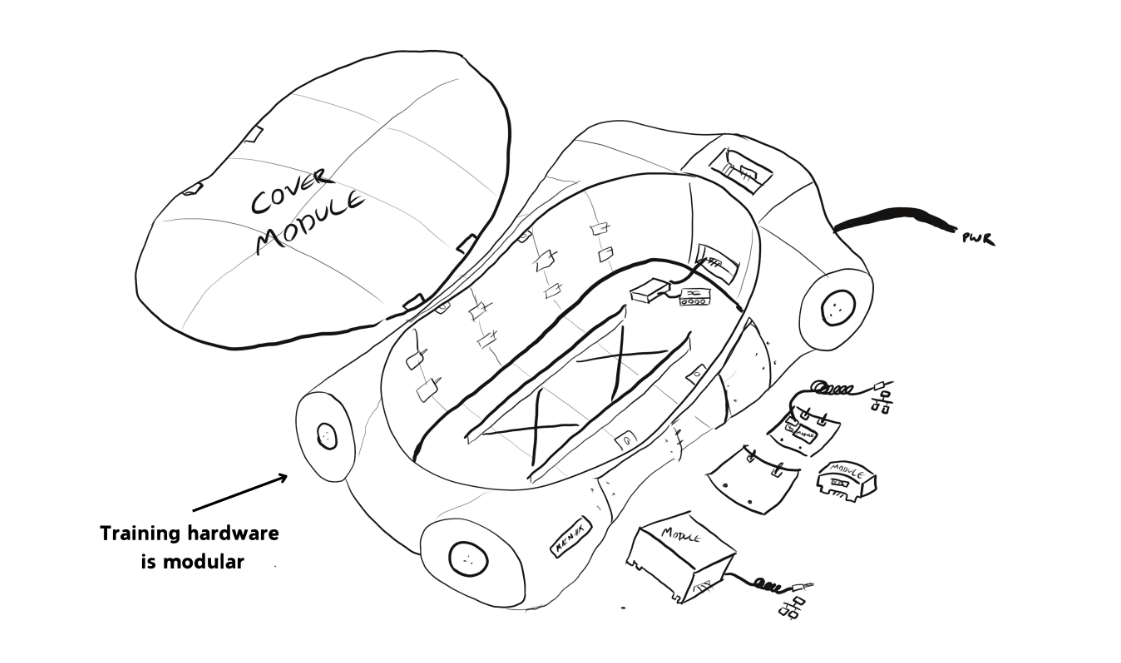
Designed a modular medical training platform with swappable torso assemblies for procedural education.