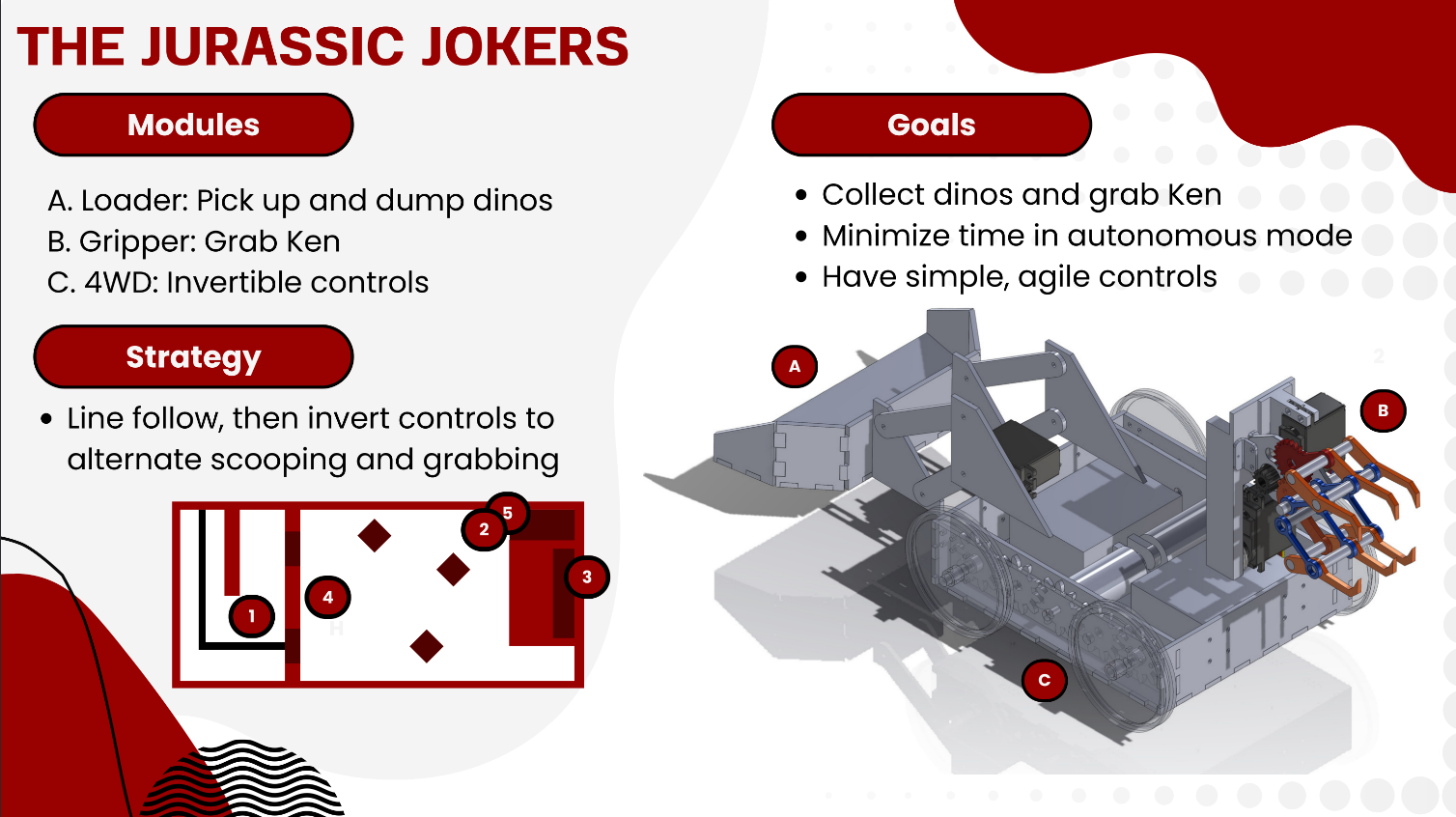
On Team Jurassic Jokers, we created a custom mobile robot to compete in the Tronassic Park Competition, in which we reached the Semi-Finals in front of an audience of 100. Per the project poster, the objective was to:
Line follow and autonomously exit the first section
Retrieve randomly placed dinosaurs in play in the game area with the scoop.
Invert controls to quickly transition to resscuing the Ken doll from the pit with the claw.
Deposit Ken on the Helipad.
Invert controls again to scoop the remaining dinosaurs until the 2 minute time limit is over.
Design and Implementation
With a restricted parts kit, and the rules of the competition fixed, we were given full reign over our strategy and design. We opted for a bucket and claw design to have the right implement for both tasks; scooping multiple dinosaurs, and retrieving the Ken doll.
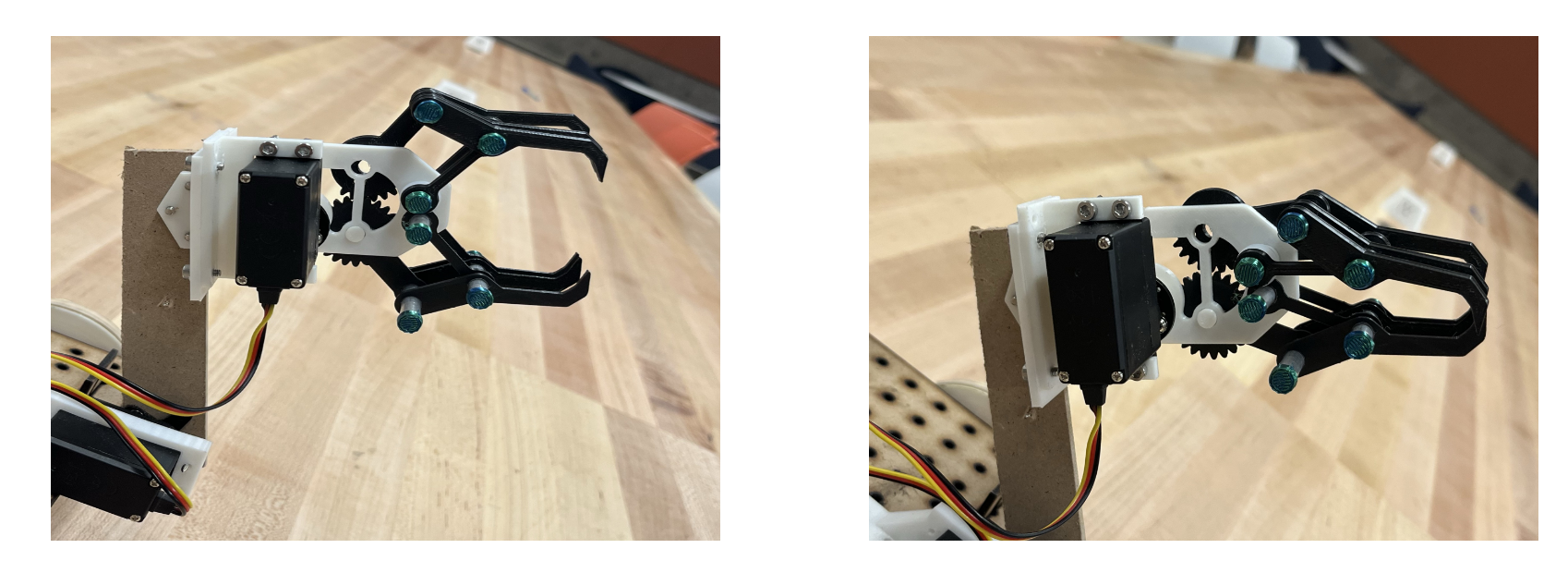
Personally, I designed and fabricated the claw mechanism, mounted the IR sensor, developed the electrical schematics, and the control architecture.
Final claw implementation.
Final controller practice before the competition:
Driving the Jurassic Joker.
Results and Analysis
For more information, see our final report below:
Takeaway
Hardware design and implementation on a fixed budget is hard.